
The Institute Colloquium: On visual tracking
Date
Monday, January 21, 2013 16:30 - 17:30
Speaker
Jiri Matas (Czech Technical University Prague)
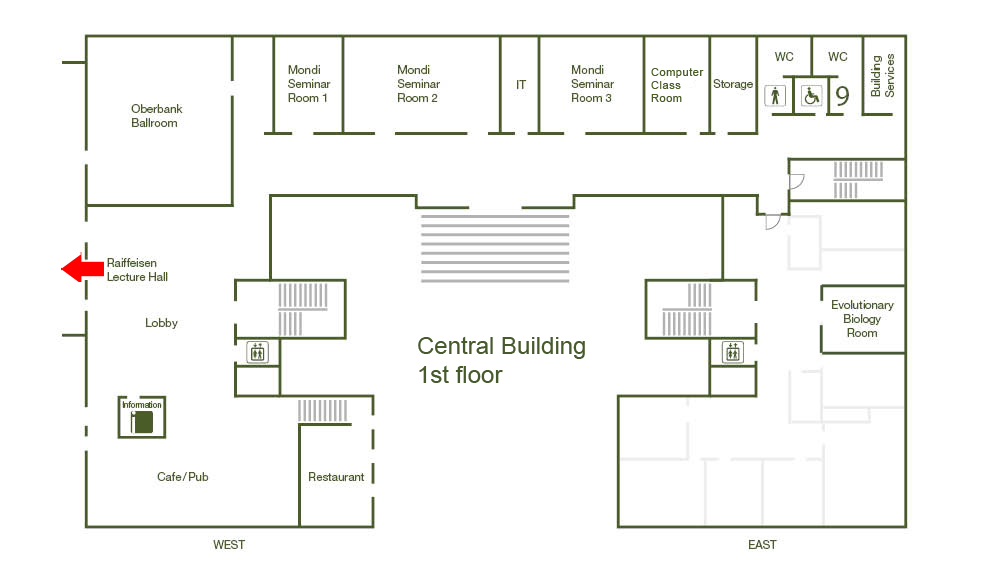
Location
Raiffeisen Lecture Hall, Central Building
Series
Colloquium
Tags
Institute Colloquium
Contact
Visual tracking is broad area covering methods ranging from fast rectangular patch matchers to complex articulated or non-rigid pose estimators. In recent years, fueled by both progress in fast detection, learning and segmentation methods as well as application-driven demand, many new tracking methods have emerged. Published tracking methods differ in many aspects such as speed, complexity of the model of the tracked entity, the (geometric) transformations assumed, mode of operation (casual and non-causal), ability to adapt and learn, robustness to occlusion and assumptions about the observer. I will spend some time on various tracking formulation and show it is not easy to define evaluate tracking performance and design informative benchmarks to assess the multi aspects of tracker quality. In the second part of the talk, I will present three trackers developed by me and my collaborators that operate at very different points in the speed-robustness-flexibility space. The TLD tracker (10 Hz, with redection and object appearance learning), the Flock-of-Trackers (100 Hz, with robust pose estimation) and the Zero-Shift-Point tracker (1000 Hz). I will focus on mechanisms for prediction and handling of tracking errors. Such mechanisms contribute to tracker robustness.